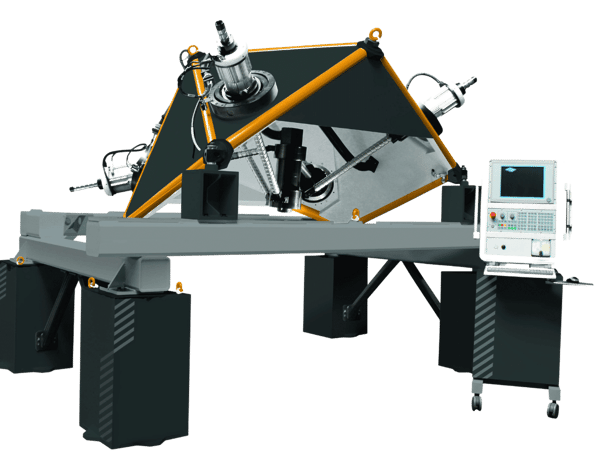
Parallel Kinematics
More than just a project, I consider it a significant achievement. Even though it was tough, I see it as my best work because nobody had done it before, and the chances of success were almost zero when I started. Developing the simulation for a 5-axis pentapod machine was an incredibly intricate task. Enabling the movement of these rods through programmed G code required the development of inverse kinematics to control all the rods and components.
Here's how I approached it: I constructed the machine's kinematics in NX by breaking down the complex closed kinematic chain into multiple open kinematic chains. The mathematical aspects of the rods' inverse kinematics were developed using Python. During the machine's operation in the CAM environment, the output values from these Python calculations were integrated into NX using NX CSE for each G code line. Consequently, each component moved according to the Python-generated output values, resulting in the machine's seamless synchronization through the synergy of Python, NX design, and NX CSE Simulation.
RoKoPro
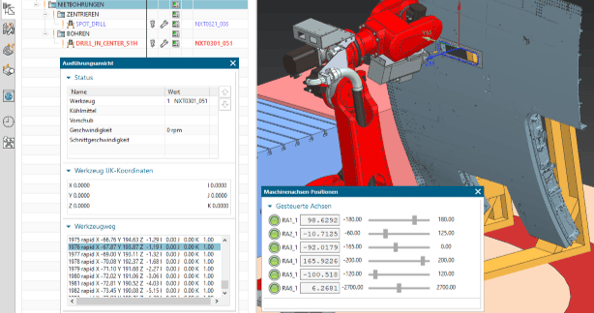
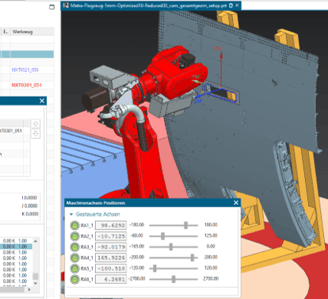
Functionally integrated robot-machine tool control for cooperative production

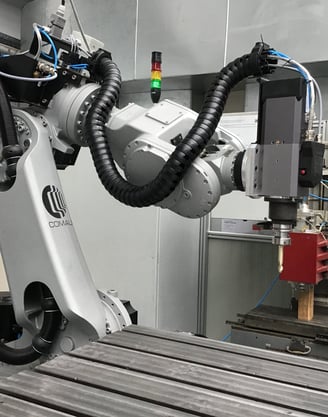
Oboe machine
Anyone familiar with music recognizes the image displayed, which is a mouthpiece. The mouthpieces are manually profiled using a device, as demonstrated in the video. In an effort to automate this process, we collaborated with the Institute for Structural Lightweight Design at TU Chemnitz to develop a compact machine for this purpose. Our team was responsible for creating the essential components, CAM programming, and digital models. Extensive testing was conducted at the university. Unfortunately, I cannot share images of the machine here due to a Non-Disclosure Agreement (NDA).